아두이노 자율주행 RC카를 만들어 직접 코딩하다
스케치 SW 및 드라이버 설치
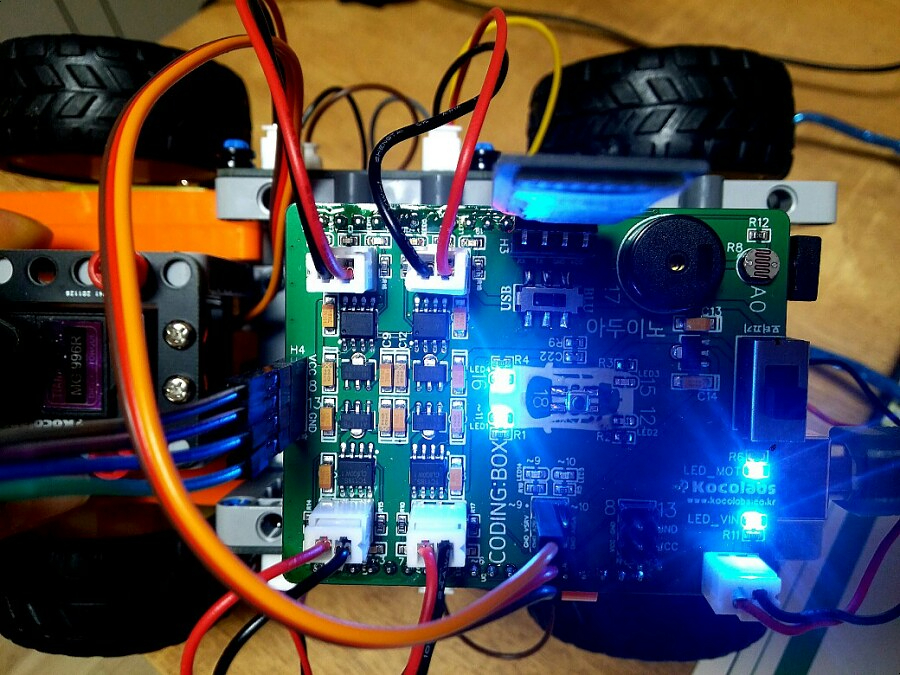
RC카 조립
<아두이노 자율주행 RC카를 만들어 직접 코딩하기> 책은 아두이노 RC카 제작에 필요한 부품 기능 소개와 코드를 볼 수 있으며 테스팅을 진행해 봅니다. 또한 블루투스 원격제어를 위해 모바일에 아두노블루투스카 앱을 설치하고 블루투스 모듈 페어링을 통해 통신을 연결하여 시리얼 모니터 사용법과 앱 UI 조정법을 습득합니다. 아두이노 RC카와 앱 간에 전달되는 명령 문자를 통한 코드를 이해하고 컴파일 및 업로드, 테스팅을 실행합니다.
소스 코드 컴파일 업 로드 테스트하다
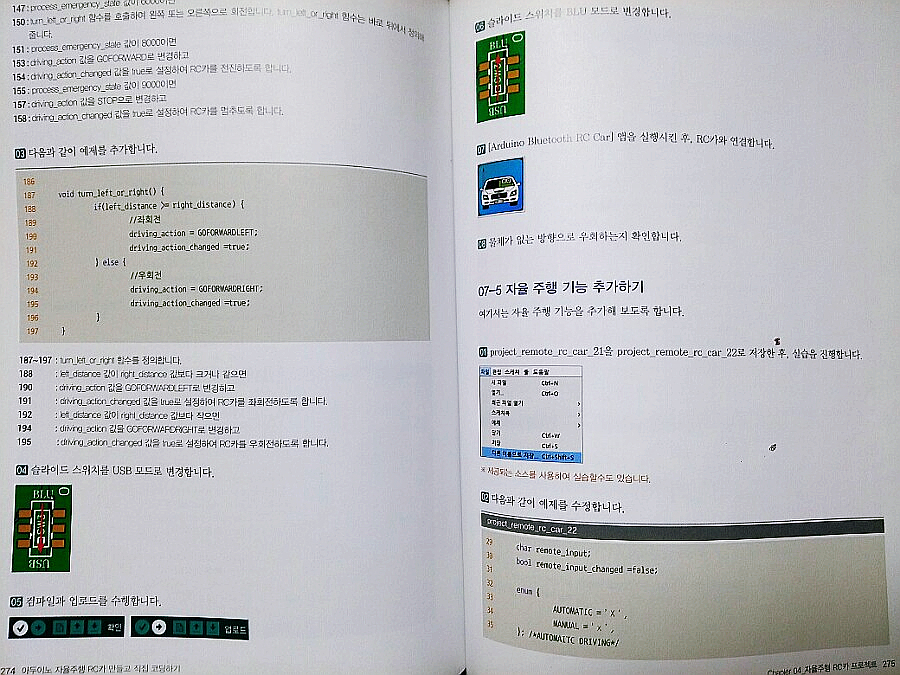
원격제어컨트롤러(앱UI)로 수동제어하는 방법 외에 자동제어, 즉 컨트롤러 없이 초음파센서로 전방물체를 감지해 이동하는 코드를 마지막으로 확인할 수 있습니다.하지만 아쉽게도 완벽한 자율주행이라고 할 수는 없습니다. 초음파 센서가 전방에만 있기 때문에 후방에도 필요하다는 것을 마지막 22번 코드, project_remote_rc_car_22 소스 코드를 테스트하면 느낄 수 있을 것입니다.또한 인공지능 자율주행을 고려하여 이 책을 읽는 것은 난이도가 맞지 않음을 알려드립니다. <아두이노 자율주행 RC카를 만들어 직접 코딩하기> 책의 코드는 초보자용으로 컨트롤러를 빼도 동작하는 방법까지 포함하고 있습니다.
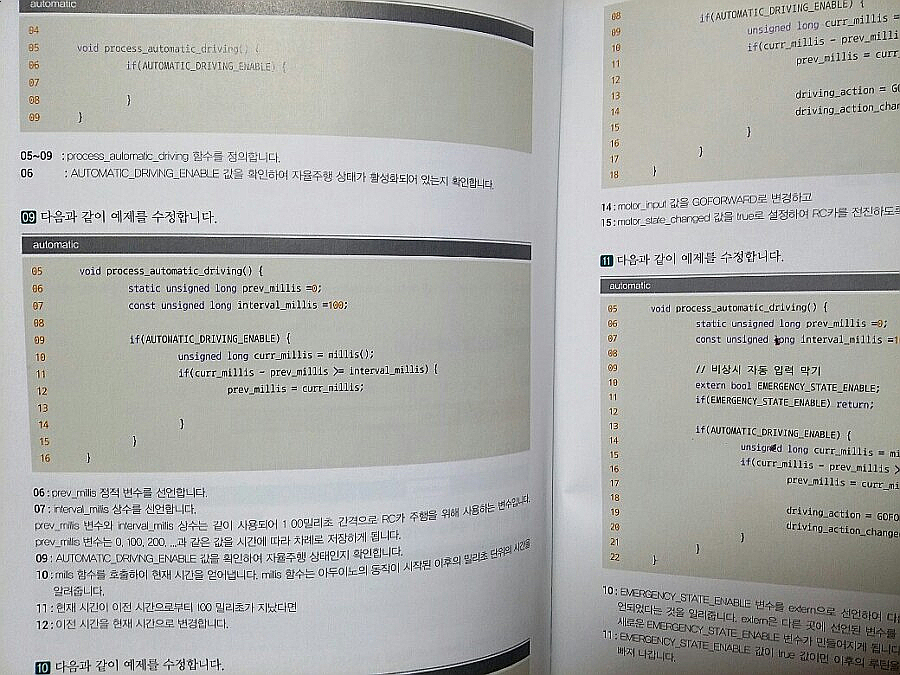

코드 설명이 라인별로 상세하게 안내되어 있습니다. 때로는 간단한 전자공학 이론을 소개하여 복습하기 쉽습니다.전반적으로 RC카 부품의 기능과 테스팅을 위한 코드를 차분히 배울 수 있기 때문에 이제 아두이노와 전자공학 이론의 기초를 배운 초보 학생들에게 RC카를 만들어보는 즐거움을 줄 수 있을 것 같습니다.
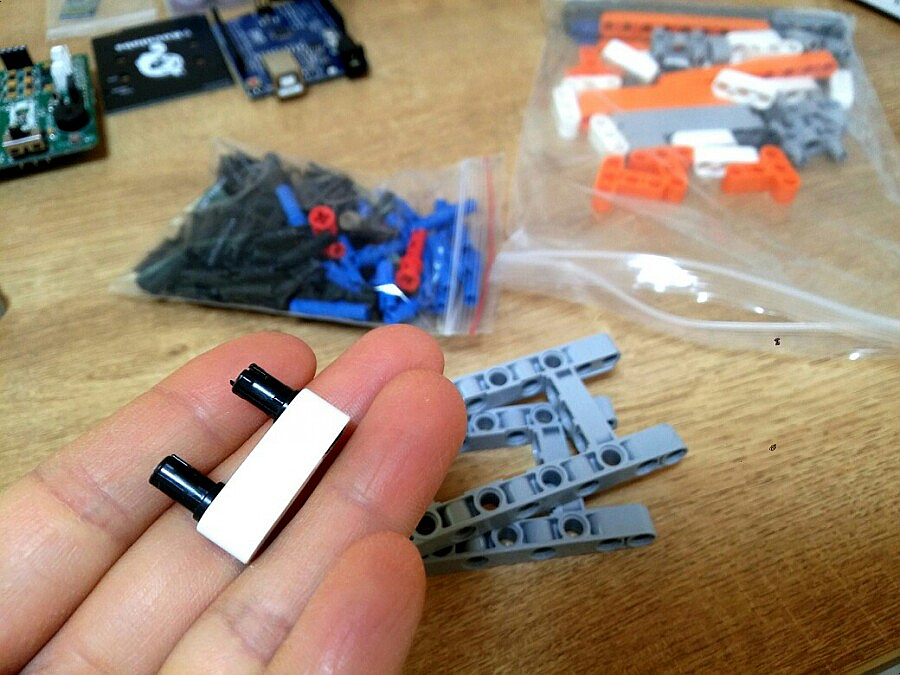
못을 끼우기 쉽게 되어 있어요!단, 한번 끼우면 떼기가 어려워요. 한번에 정확한 위치에 꽂도록 합니다.
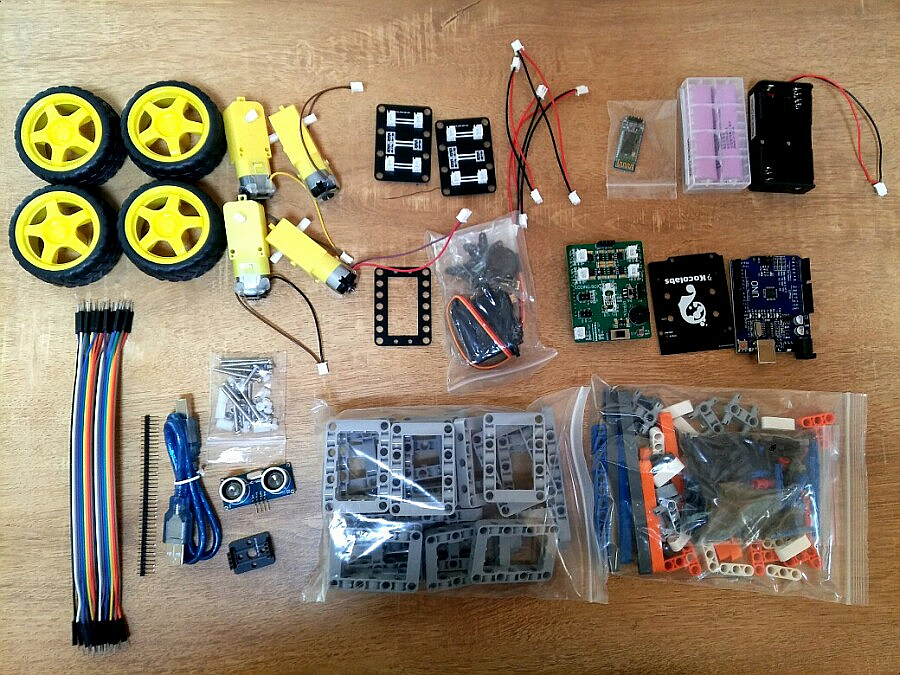
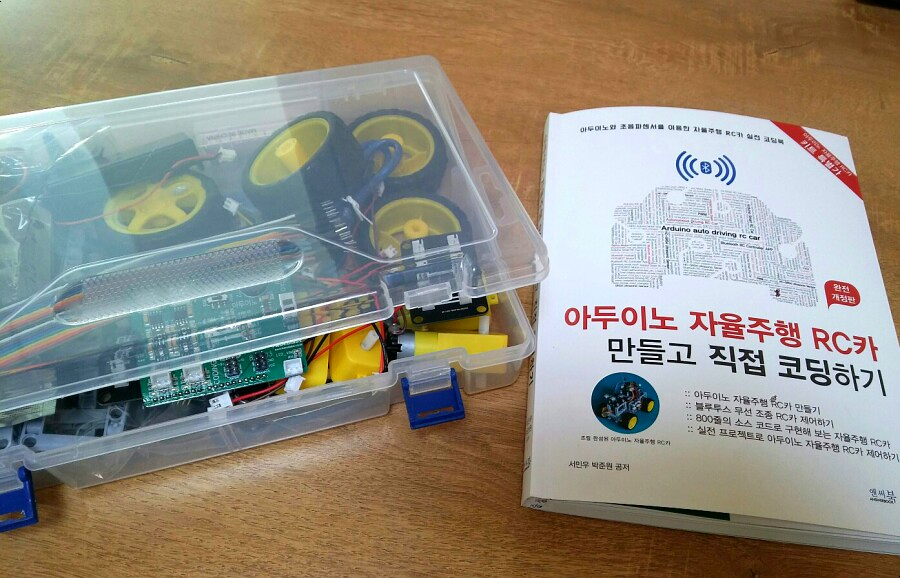
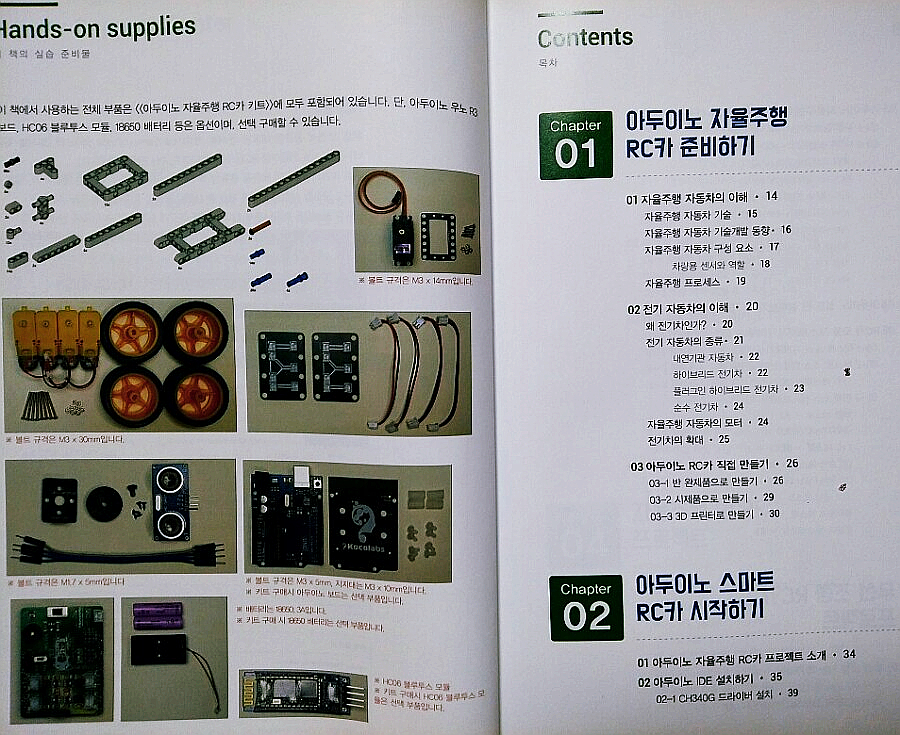
아두이노 자율주행 RC카를 만들어 직접 코딩하기 > 책과 함께 구매할 수 있는 키트입니다. 기본 모듈 키트 외에 옵션으로 아두이노우노 호환보드, HC06 블루투스 모듈, 18650 배터리 2개를 추가 구매할 수 있습니다.아두이노보드를 배우면 보드와 블루투스 모듈은 있을 수 있어서 따로 구입하게 한 것 같고 배터리는 소모품이라 별도 구매인 것 같습니다.
로봇 부품의 못을 주의 깊게 보면 편리하게 끼이게 되어 있음을 알 수 있습니다. 꽂을 때 구멍에 넣고 가볍게 누르면 쉽게 들어가고, 한번 들어가면 잘 빠지지 않아요! 이것은 장점이자 단점이기도 하다는 것을 로봇 조립해 보신 분들은 아시겠지만 가능한 한 한번에 정확한 위치에 넣어주세요.어떤 로봇은 뽑는 도구(특수 드라이버)도 제공되고 있지만 여기에는 없습니다.
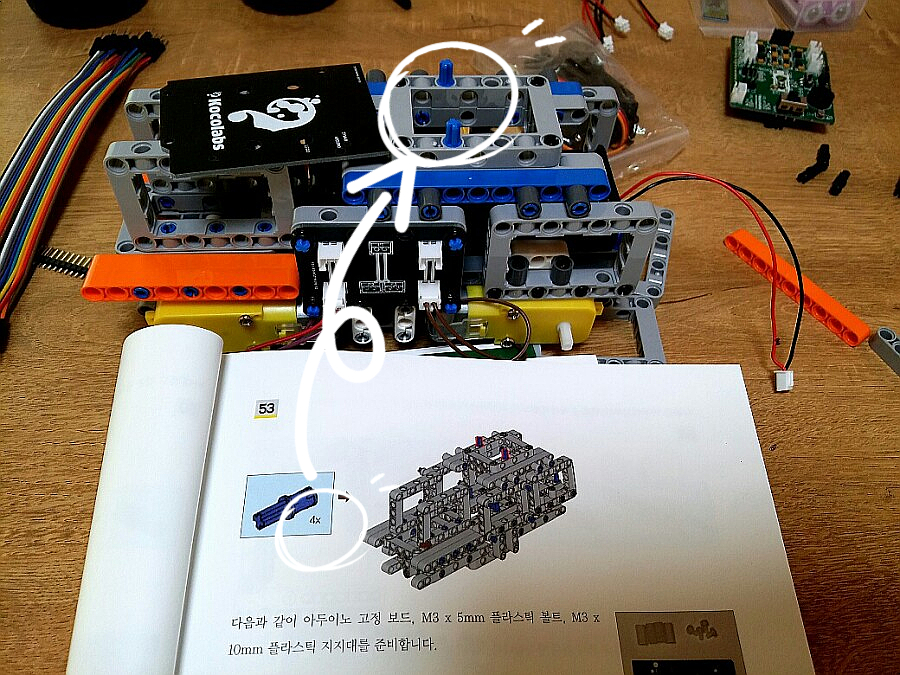
책 61페이지의 오타를 수정해주세요! 파란색 못 4개가 아니라 2개를 사용합니다.
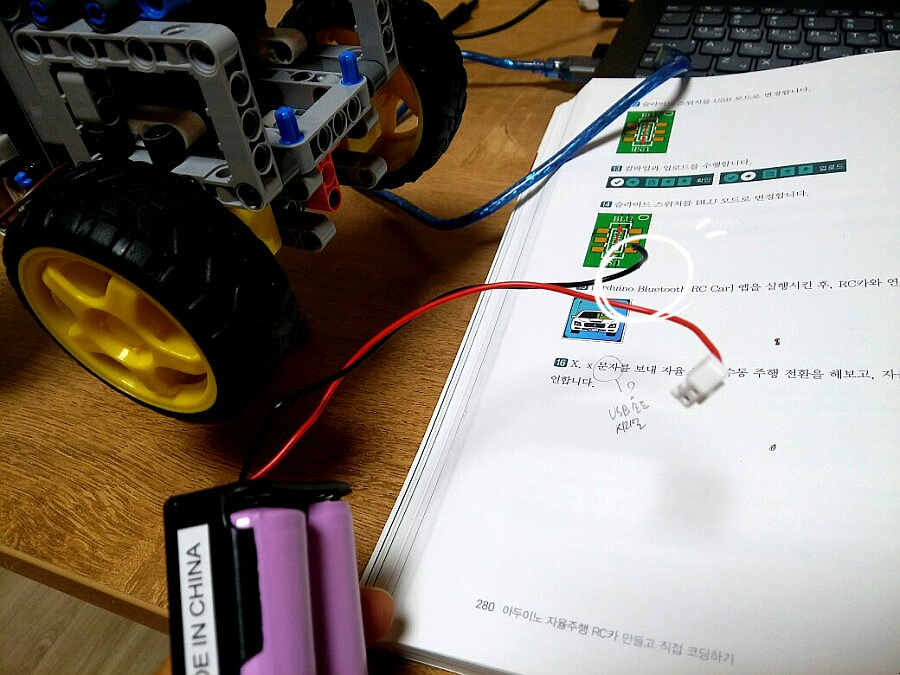
61 페이지는 2개 못을 사용합니다. 그리고 162쪽은 9번과 10번을 삭제하고 11번을 수정하여 시리얼 모니터를 통해 A, a문자를 보내면서 전조등과 후미 등의 동작을 테스트하십시오.마찬가지로 280페이지 마지막 코드에서도 16번 X와 x 문자를 보내려면 12번 USB 모드와 13번 컴파일을 업로드한 후 ‘시리얼 모니터를 통해 X, x 문자 보내기’ 자율주행, 수동 주행 전환을 하면 됩니다. x 문자를 USB 모드에서 시리얼 모니터를 통해 문자를 보낸 후에는 14번 BLU 모드로 변경하고 15번 Arduino Bluetooth RCCar 앱을 실행 후 RC카와 연결합니다.위의 해당 페이지에서 수정할 부분을 참고하여 테스트를 수행하십시오.
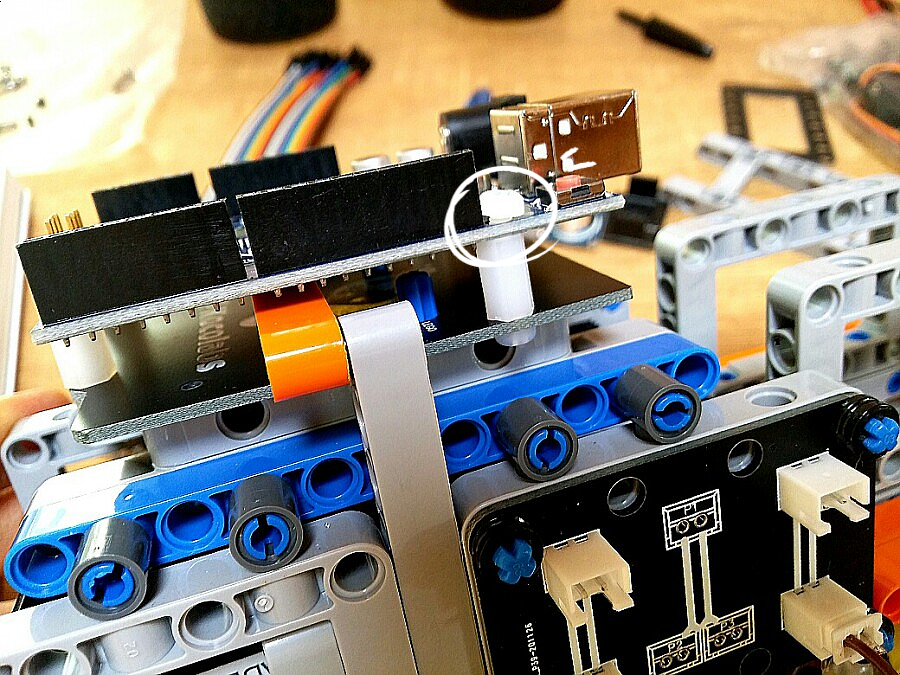
아두이노보드를 고정할 때 나사 4곳 중 1곳이 끼기 어렵게 되어 있습니다. 살짝 기울여서 간신히 끼웠어요.
아두이노 보드를 RC 카에 접속할 때는 방향에 주의해 주십시오. 그리고 나사 4곳 중 핀을 끼우는 곳에 연결하는 나사는 너무 가까워서 끼우기 어려울 수 있습니다. 참고해주세요.
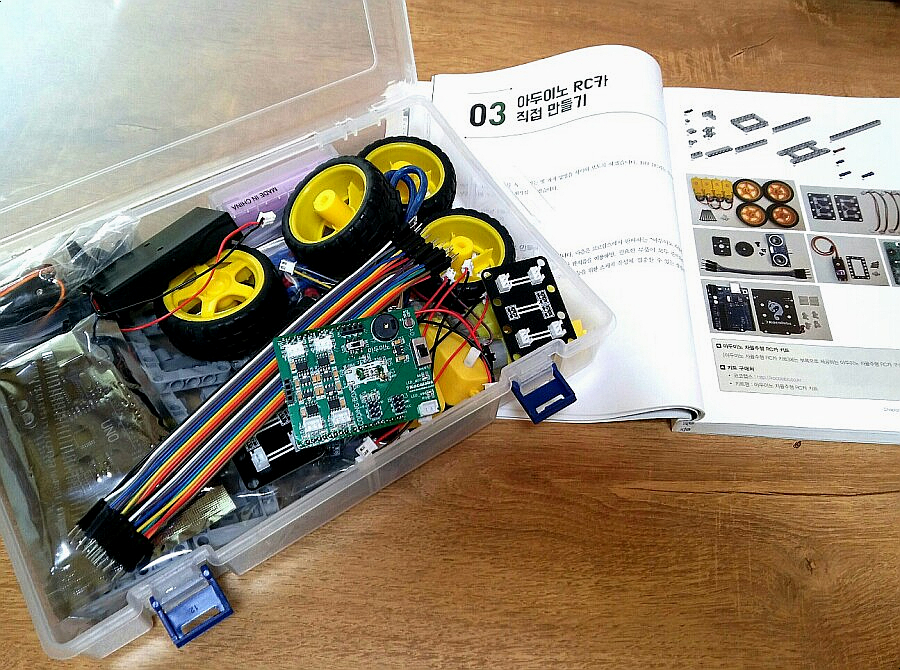
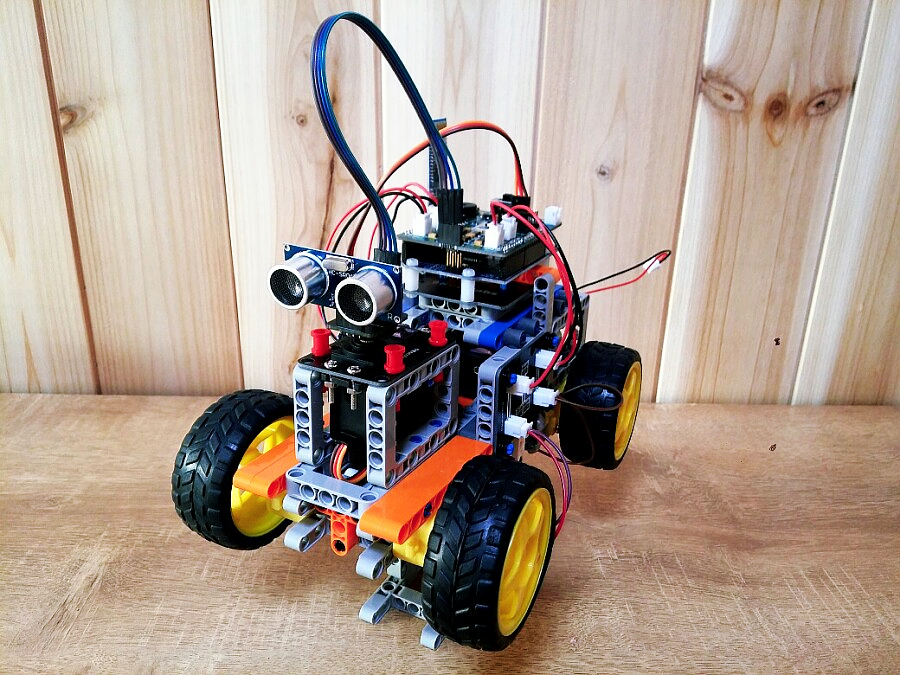
RC카 <아두이노 자율주행 RC카를 만들어 직접 코딩하기> 본 Chapter 2-3 RC카 조립의 조립 순서와 이미지를 보고 따라 만들면 이렇게 RC카가 완성됩니다!Chapter 2-5 RC카 모듈 테스트’ 순으로 소스코드를 다운로드하고 스케치부터 컴파일 및 RC카에 업로드하여 테스트를 각각의 부품별로 수행합니다.
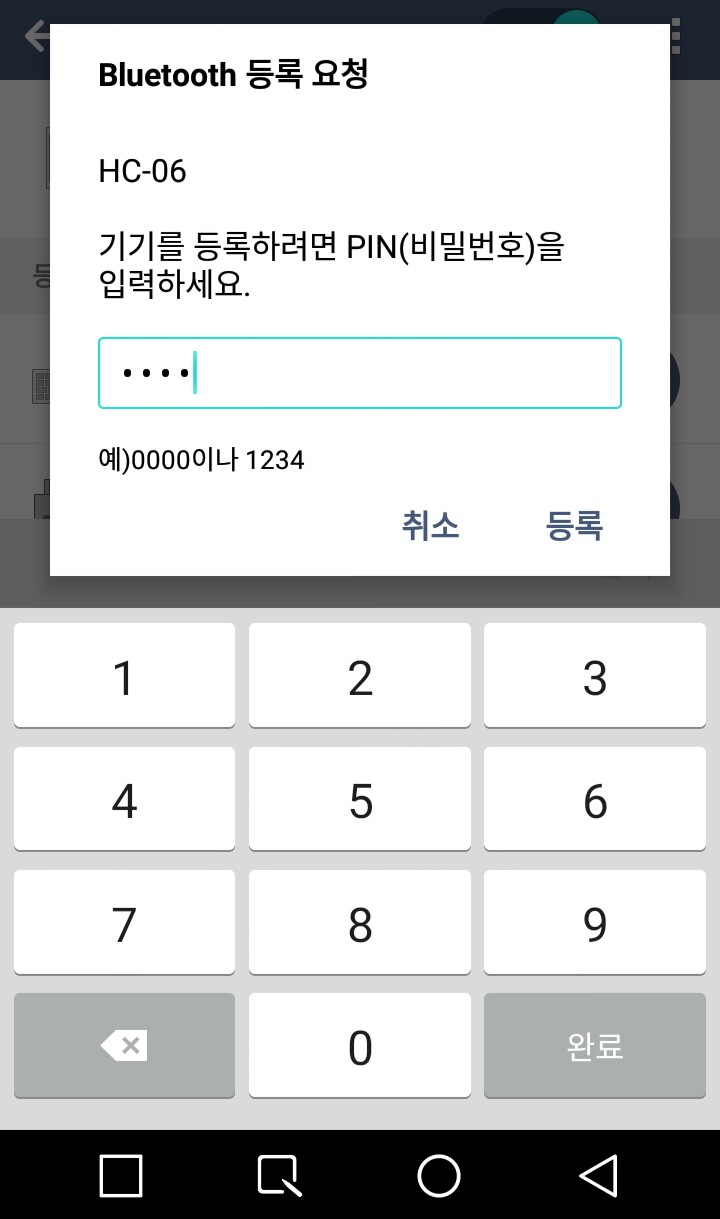
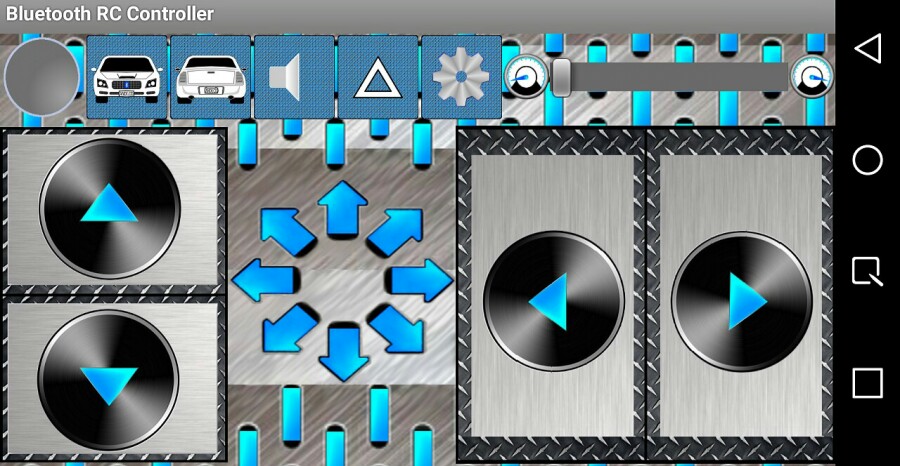
이후 ‘Chapter3 무선 조정 RC카 프로젝트’에서는 원격 제어를 위해 리모컨 컨트롤러 역할을 수행해주는 앱을 모바일에 설치합니다. 그리고 블루투스와 연결하는 과정을 책에 제시된 순서대로 따릅니다.
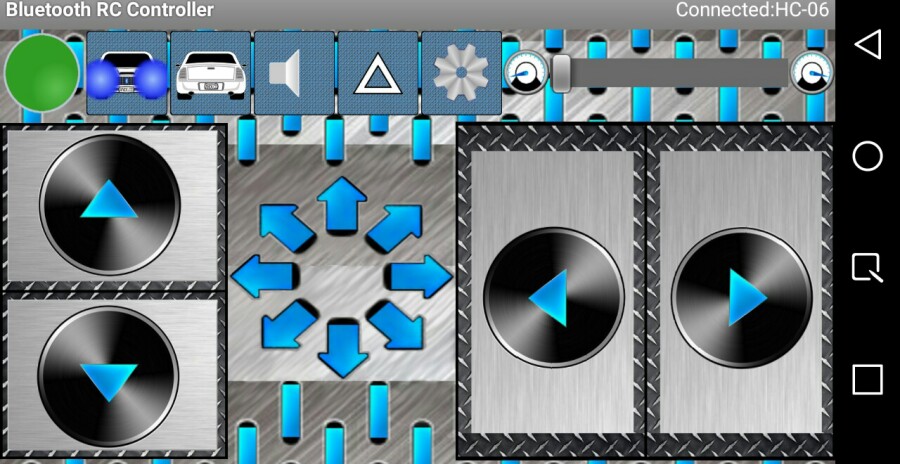
앱 설치 및 블루투스 연결
Bluetooth 연결하면 “녹색”으로 바뀝니다!
아두이노 자율주행 RC카를 만들어 직접 코딩하기 > Chapter3의 ’03 원격제어 기능 추가하기’ 장을 따라하면 손쉽게 무선조종이 가능합니다.
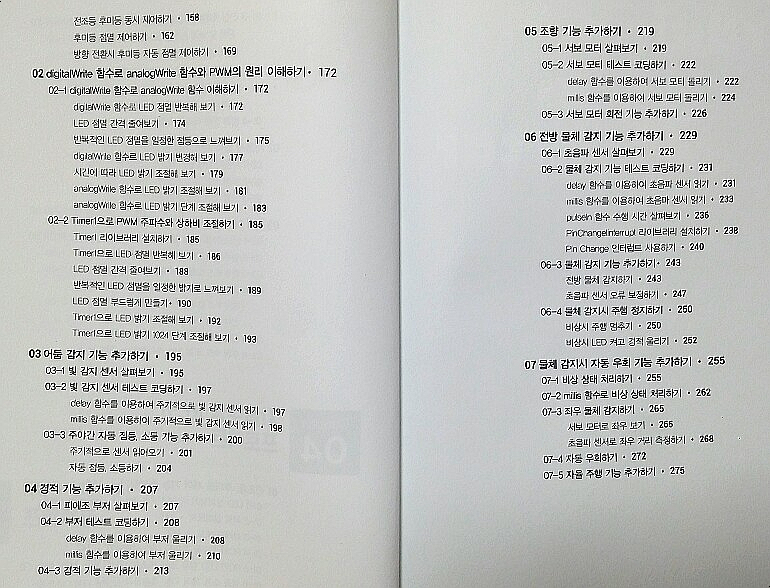
소스 테스팅 앱 UI 버튼을 따라 바퀴 모터의 정주행과 역주행으로 전진과 후진 및 턴을 제어했다면 여기에 다양한 추가 기능을 순차적으로 추가함으로써 코드와 파일 수가 증가합니다. 원격주행 스티어링 제어 기능 추가, 주행속도 조절 기능 추가, 헤드라이트와 테일라이트 제어 기능 추가, 경적 기능 추가, 초음파 센서와 서보모터 기능을 통해 전방 및 좌우 물체 감지 기능 추가, 물체 감지 시 자동 우회 기능 추가합니다!
‘물체 감지 시 자동 우회 기능’이 마지막 페이지이며, 이를 빌려 블루투스 리모컨 앱을 통한 사람의 조정 없이 RC카 혼자 돌아다닐 수 있는 가능성까지 볼 수 있습니다. 이에 자율주행과 명함을 내밀기에는 무리지만 첫걸음을 떼고 끝낼 수 있습니다.
배터리 케이스의 선이 잘 빠지고 잘리기 쉬우므로 주의하십시오.아쉽게도 중국산 배터리 케이스는 선이 계속 빠져있었는데 금방 끊어져버렸고.. 모터 4개중 하나의 축이 길이가 특히 짧고 바퀴가 떨어져 테스트를 제대로 수행하기 어려웠습니다. 메가넘 바퀴가 옵션인 것 같은데 좀 더 괜찮을까요?
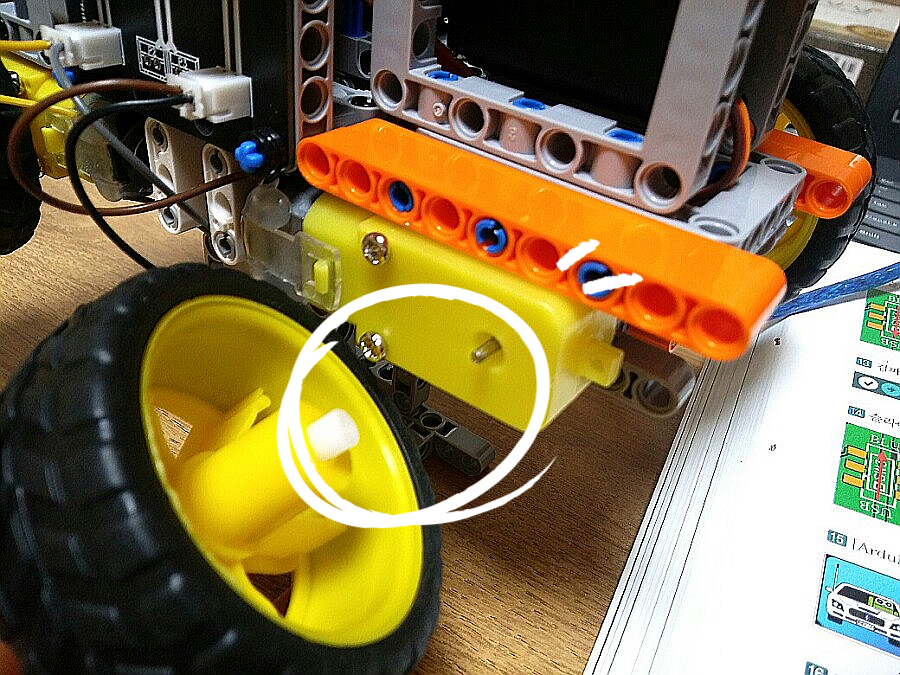
모터축이 빠지는 불량이 있을 수 있습니다.항상 부품의 연약함과 불량함에 안타까움을 느낍니다. 자율주행차 테스트에는 반복 훈련이 필수인데 특히 바퀴는 튼튼함이 필요합니다.
친절하고 상세한 코드 설명과 소스코드의 완벽한 제공으로 테스팅이 용이했습니다. 무선 조정까지 충실히 배울 수 있어 자율주행을 조금 시도해 볼 수 있습니다.반복되는 테스트를 위해 키트의 단점을 보안해주는 대책 마련이 가능하다면 더 흥미롭게 배울 수 있을 것입니다.
출판사에서 도서를 협찬받았지만 주관적인 견해에 따라 작성되었습니다.