현대차는 올해 자율주행차 레벨3 기술을 G90에 적용할 예정이라고 합니다.
그래서 고속도로 정도는 편하게 이동하는 시대가 열릴 것으로 예상됩니다.
이런 시대 기류에 맞춰서? 자율주행 자동차의 원리, 문제점, 수준에 대한 기본 지식을 습득하는 시간을 갖도록 합니다.자율주행차의 원리와 문제점
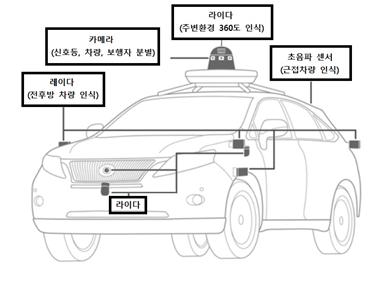
자율주행차에 관여하는 하드웨어는 크게 3가지가 있습니다.
라이더 레이더 카메라네요.
레이더는 차 주위에 전파를 발사하는 방식으로 작동합니다.
발산된 전파가 반사되어 돌아오는 시간을 계산함으로써 장애물의 위치와 거리를 분석하는 원리입니다.
그러나 레이더의 문제점은 인식 방법의 특성상 사물의 형태를 명확하게 인식하지 못한다는 것입니다.
즉, 거리와 위치 속도 등을 체크하는 용도로 적합하다고 할 수 있습니다.
따라서 레이더를 장착한 차량은 장애물 형태를 인식할 수 있는 광학 카메라와 함께 자율주행차 시스템을 구축하게 됩니다.
하지만 장점도 분명해요. 부품비가 낮다는 겁니다.
또한 라이더는 30미터 이내 가까이에 있는 물체를 식별할 때 인식률이 떨어지는 문제가 있는데 레이더는 주파수의 크기에 따라
단거리 파장은 0~100m, 장거리는 150~200m를 감지할 수 있습니다.
라이다(LiDAR)는 고출력 레이저 펄스를 발사하여 반사하여 돌아오는 시간을 측정하는 방식입니다.
즉, 레이더는 전파를 사용하고 라이더는 레이저를 사용하는 것이군요.
라이더는 1550나노미터의 강력한 직진성 근적외선을 사용하지만 곧게 뻗는 레이저 특성상 레이저가 반사돼 돌아올 때도 뒤틀림이 발생하지 않습니다.
그리고 오차범위에서 mm단위를 사용할 정도로 정밀한 관측이 가능하며 사물의 형태를 상당히 잘 인식하고 다각도로 다수의 레이저를 발사함으로써 주위 상황을 3차원으로 인식하기도 합니다.
반면 라이다의 문제점은 센서 부품 하나로 8200만에 달할 정도로 경제적 부담이 크다는 점입니다.
게다가 비나 안개 눈이 내리면 인식률이 저하되는 문제도 있습니다.
따라서 이러한 악천후 상황에서는 오히려 광파에 비해 흡수도가 낮은 전파가 유리하기도 합니다.이렇게 자율주행차 시스템을 양분하고 있는 레이더와 라이다는 일장일단의 면이 뚜렷한 편인데요. (엘렌 머스크는 라이더에 대해 매우 회의적이며 레이더만을 사용하여 FSD-풀 셀프 드라이빙-시스템을 개발했습니다.)
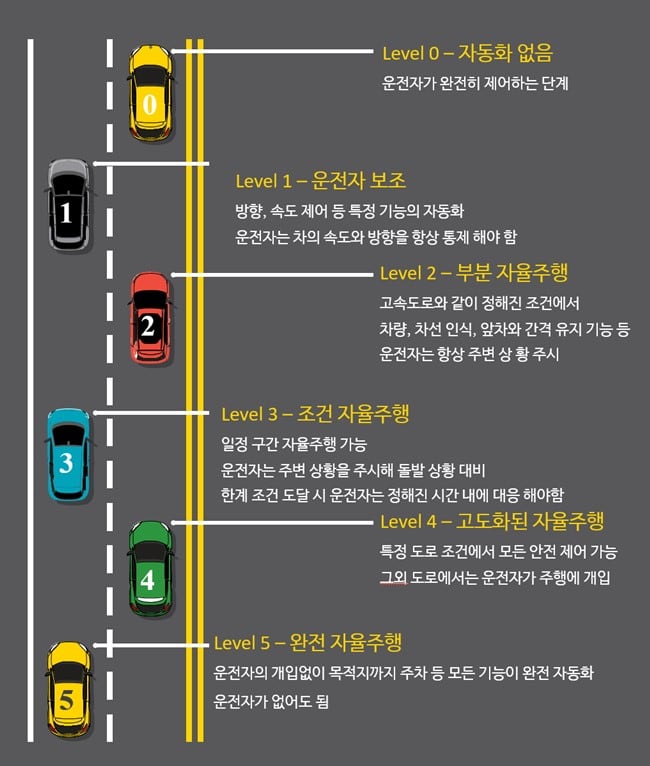
그러나 앞으로는 레이더 라이다 카메라 모두 균형 있게 조합된 차량을 볼 수 있을 것으로 예상됩니다.자율주행차 레벨망정 자율주행차 레벨부터 간단하게 정리해 보겠습니다.
현재 5단계로 구분되어 있습니다.
레벨 1은 크루즈 컨트롤, 차선이탈경보등(LDWS), 후측방경보장치(BSD)가 장착된 차량을 말하는데 사실 자율주행이라고 보기 어려운 단계입니다.
모든 조작은 완전히 운전자 본인의 몫이며, 다만 부수적인 안전장치가 위험 신호를 알릴 뿐입니다.레벨 2는 자동차가 보다 스마트하게 주행에 개입하는 단계입니다.
자동차 스스로 감속하고 거리를 유지하거나(ASCC 어드밴스 스마트 크루즈 컨트롤) 방향을 조향하여(ADAS: 차선이탈충돌회피) 차선을 유지하고(LDWS: 차선이탈복귀)) 시에는 긴급제동(AEB 자동긴급제동장치)을 하기도 합니다.
그러나 제한된 몇 가지 상황에 한해 특정 기능을 활용한다는 개념에 가깝고 운전의 주체는 여전히 운전자 자신입니다.
그리고 여기서 조금 더 발전된 한 단계가 2.5단계인데 3단계라고 하기에는 애매하고 2단계보다는 진화한 수준을 말합니다.
테슬라의 오토파일럿 시스템이 여기에 적용됩니다.레벨 3은 본격적인 자율주행 단계입니다.
특정 상황이나 긴급 시에만 자동차가 개입하는 것이 아니라 정해진 조건 하에서 일상적인 주행에도 관여합니다.
하지만 일반 도로에서는 자율주행에 한계가 있어 고속도로에서는 충분히 가능할 것으로 보고 있습니다.
도로가 막힐 경우 스스로 추월할 수도 있어 장애물을 피하고 감속과 과속을 자유자재로 제어하게 됩니다.
그러나 아직 안전성 면에서는 불안정한 단계이기 때문에 운전자가 반드시 운전석에 앉아 운전대를 잡고 불시에 사태에 대비해야 합니다.
그리고 만약 정해진 조건 하에서 운행했음에도 자율주행 사고가 발생할 경우 그 과실을 시스템에 적용하게 됩니다.
(아직 법적으로 제도화되지 않았고 명확한 기준도 없음) 레벨 4는 레벨 3을 보완하여 불완전한 요소를 극복한 단계입니다.
고속도로뿐만 아니라 도심에서도 완전 자율주행이 가능하지만 운전자가 탑승해 운전대를 잡고 있어야 하는 건 마찬가지입니다.레벨 5에서는 자율주행차의 수준이 인간의 능력을 넘어선 단계로, 이 시기가 되면 오히려 인간 운전자야말로 안전을 위협하는 불완전한 존재로 인식될 수 있습니다.