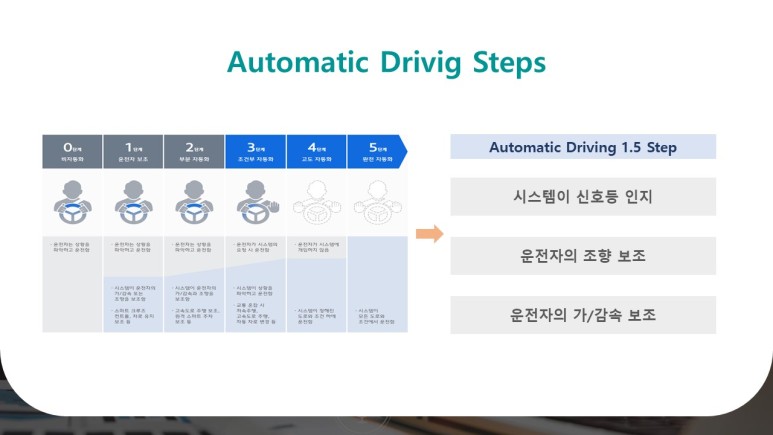
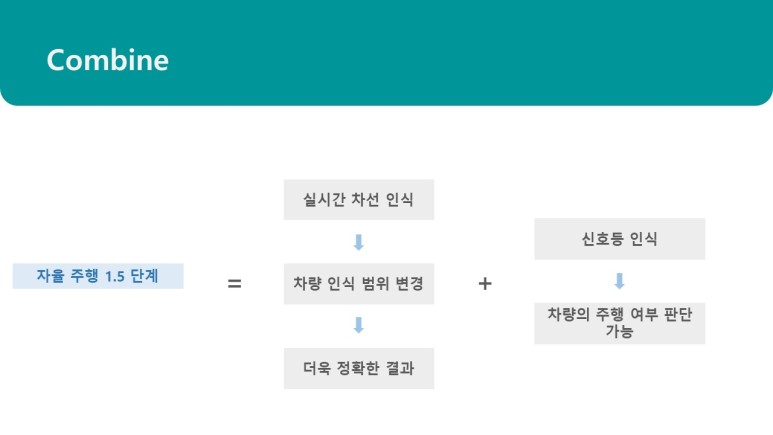
자율주행이 완전히 자동화되면 운전에 사용한 시간을 내 것으로 만들 수 있어 우리의 삶은 더욱 업그레이드 됩니다. 이러한 삶을 꿈꾸는 의미에서 현재 자율주행 수준에 훨씬 못 미치지만 이번 실험과목에서 배운 알고리즘과 Envidia JETSON XAVIER NX보드를 통해 자율주행 1.5단계를 표현하고자 노력했습니다.
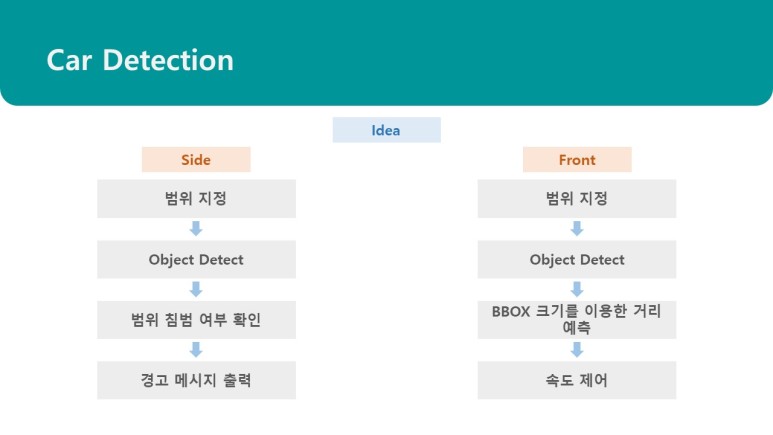
실시간 물체 인식에 뛰어난 성능을 보여주는 YOLOv4를 이용하여 차량과 신호등 그리고 사람을 인식하였습니다.그리고 OpenCV를 이용하여 차선을 인식하고 앞차, 옆차, 가/감속 표시를 해 주었습니다.
두 명의 동기와 함께 진행하여 한 명의 친구가 피피티를 만들었습니다.
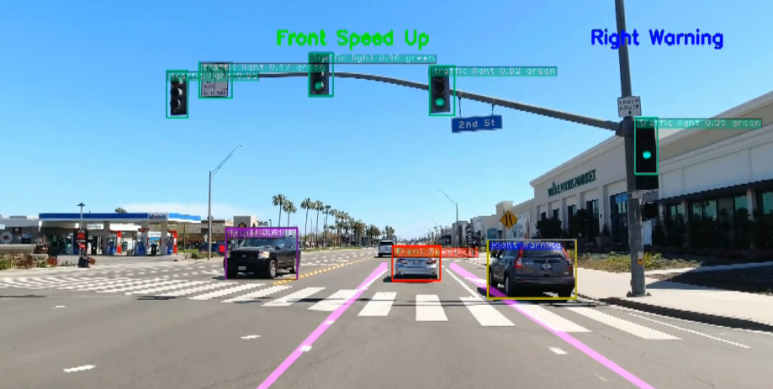
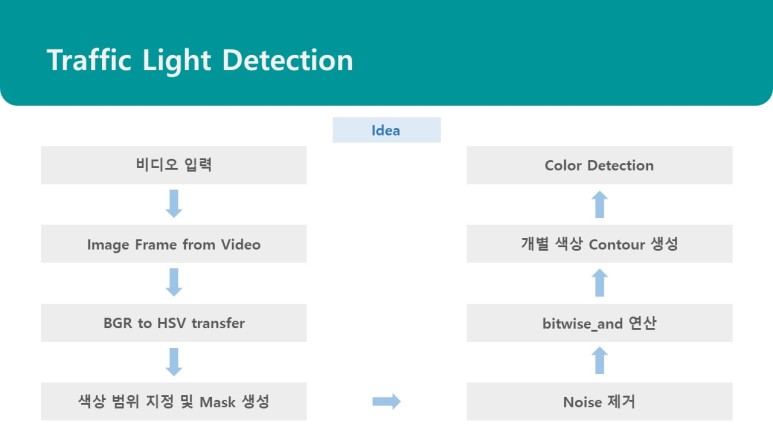
사실 신호인식은 5G 통신을 통해서 하는 게 더 정확하지만 만약의 경우를 대비해서 영상처리라도 인식해야 할 것 같습니다.

차선은 소실점을 고려하여 교차하는 두 직선으로 표현하였습니다.
OpenCV를 이용한 차선 인식도 포함하고 있습니다마지막 데모 영상은 저작권 때문에 캡처 짤만 올렸어요ㅜ
- References 현대자동차의 자율주행 로드맵 미국자동차공학회에서는 자율주행 단계를 총 6단계로 분류하고 있습니다.www.hyundai.co.kr영상Deep Drive PLWarsaw 0002 sequence4K datasetarchive.orgYOLOv4-tiny-416, int8TensorRT YOLOv4, YOLOv3, SSD, MTCNN, and GoogLeNet – jkjung-avt/tensorrt_demosgithub.comColor DetectionA Computer Science portal for geeks. It contains well written, well thought and well explained computer science and programming articles, quizzes and practice/competitive programming/company interview Questions.www.geeksforgeeks.org차선인식 OpenCVPython3.5 그리고 Opencv 3.1 기준 코드 작성 셋팅만 제대로 됐다면 복붙만해도 문제없이 돌아갈 것이다….m.blog.naver.comChanging Colorspaces Learn to change images between different color spaces. Plus learn to track a colored object in a video. Geometric Transformations of Images Learn to apply different geometric transformations to images like rotation, translation etc. Image Thresholding Learn to convert images to … docs.opencv.org 세계에서 가장 작은 AI 슈퍼컴퓨터로 모든 AI 프레임워크를 지원합니다.www.nvidia.com