접속 기반 인지 기술로는 ‘HD맵’과 ‘V2X 통신’이 있습니다.
● HD맵
‘HD맵(High Definition Map, 고정밀도 지도)’은 자율주행을 위해 센티미터(cm) 수준의 정확도를 갖춘 3D 입체 지도를 말합니다.

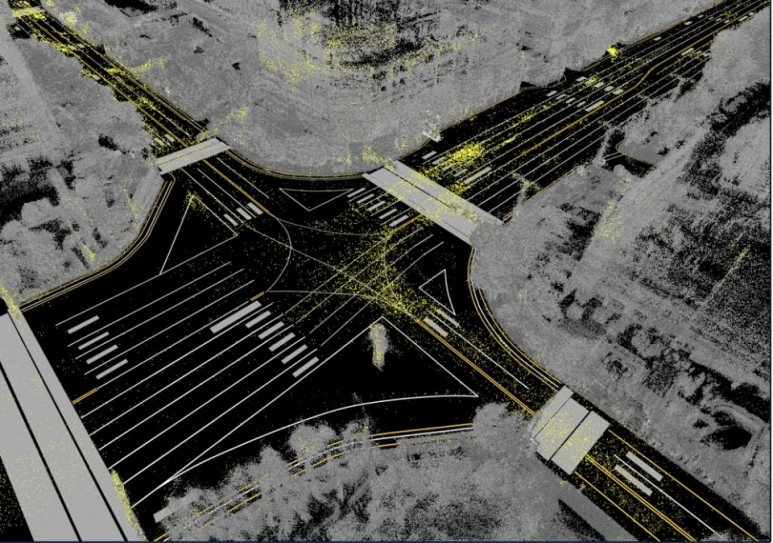
<여의도 지역 HD맵, 출처 : 네이버랩스> HD맵을 이용한 위치파악은 자율주행에 있어 신뢰할 수 있는 주변 환경정보 인지에 중요한 요소입니다. 일반적인 차량이나 ‘레벨2’ 이하 자율주행차의 경우 내비게이션 지도 활용은 주로 목적지를 향한 경로를 설정하고 과속 감지 카메라 등을 확인하기 위한 용도이므로 센티미터 수준의 HD맵은 필요하지 않습니다.
그러나 ‘레벨2’ 이상의 자율주행차에서는 센서 기반 인지 장비, 즉 센서 정보만으로는 다양한 한계사항이 생기지만 인지 범위의 한계, 장애물에 의해 가로막는 부분, 기후나 조명 등으로 인해 잘못 인지하는 경우 또는 센서 성능 자체의 한계 등으로 자율주행에 제한이 발생할 수 있습니다.
HD맵은 중앙선, 차선 등 차선단위 정보는 물론 자율주행차 주행공간에 있는 가로등, 신호등, 표지판, 연석, 노면마크, 빌딩표면 및 수직구조물 등 각종 사물 및 구조물 등에 대한 정보를 3차원 디지털 형태로 세밀하게 가지고 있어 자율주행 판단 과정에 큰 도움이 됩니다.
내비게이션에서 사용되는 지도가 2차원 형태의 건물과 주행차선에 관한 데이터라면 HD맵은 3차원 형태로 구성된 주행경로상의 수많은 물건에 대한 물체표면의 정밀사진과 같은 데이터의 집합체로 각각의 데이터는 물건의 물리적 크기, 위치 및 형상에 관한 정보를 포함하고 있습니다.

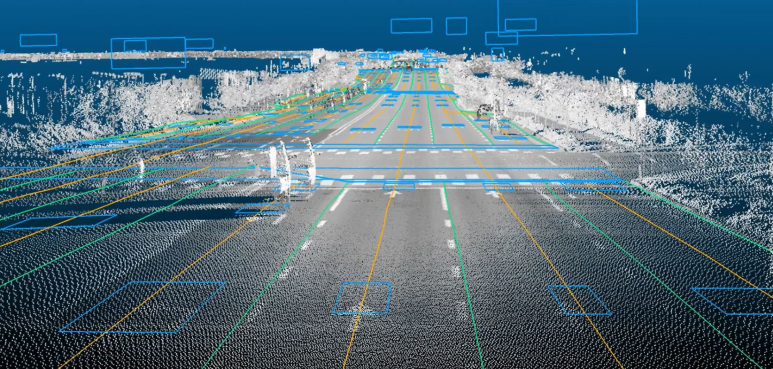
<HD맵, 출처 : 맵퍼스 Web News Room> 이러한 HD맵은 ‘랜드마크 인지(Landmark Perception)’와 함께 사용되어 보다 효과적으로 활용할 수 있는데, 그것은 시간에 따른 변화가 없는 특징이 있는 랜드마크를 활용하여 보다 세밀하게 현재 위치 파악을 할 수 있기 때문입니다.
HD맵을 구축하기 위해서는 데이터를 수집하고 후처리하여 영상화하는 작업이 필요하기 때문에 하드웨어와 소프트웨어 기술이 모두 요구됩니다. 하드웨어 기술로는 차량이 이동하면서 도로 위 정보를 수집하기 위한 카메라, 라이더, GPS 등 다양한 센서를 장착한 공간정보조사 시스템인 ‘MMS(Mobile Mapping System)’가 가장 중요합니다.
소프트웨어적으로는 임의의 공간을 이동하면서 해당 공간의 지도나 현재 위치를 추정하고 지도의 정확성을 높이는 알고리즘인 ‘SLAM(Simultaneously Localization And Mapping)’ 기술을 활용해 MMS에서 수집된 빅데이터를 바탕으로 지도나 형상에서 카메라의 위치를 역추적하거나 수집된 빅데이터를 구조화하여 주행 패턴을 분석하는 등의 방법으로 HD맵이 작성됩니다.
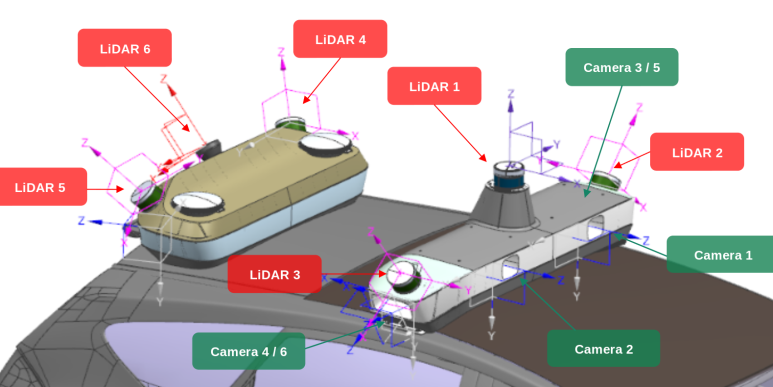
<네이버랩스의 R1 MMS 센서 구성, 출처 : 네이버랩스>
이렇게 작성된 HD맵 정보는 클라우드 서비스를 통해 자율주행차 판단 및 경로 설정에 사용됩니다. 한편 HD맵 정보는 센티미터 수준의 정보를 가지고 있지만 도시의 변화, 건설, 공사 등으로 수시로 그 정보의 변화가 발생할 수 있지만 신뢰할 수 있는 정보가 되기 위해서는 실시간으로 정보가 업데이트되어야 하는 점이 중요합니다.
이를 위해 HD맵 제공 기업이 수시로 MMS 시스템이 탑재된 차량을 운행해 해당 정보를 업데이트할 수도 있지만 주행 중인 모든 자율주행차가 자차에 장착된 센서를 통해 취득한 도로나 주변 상황 정보를 HD맵 클라우드로 전송하는 방식의 ‘클라우드소싱(Crowdsourceing)’을 활용하는 것이 보다 효율적입니다.
●V2X 통신
앞서 HD맵의 효율적인 사용을 위해서는 클라우드 소싱 및 클라우드가 필요하며, 이들을 활용하기 위해서는 자율주행차가 인터넷과 연결되는 통신 기능이 필요합니다. HD맵 사용 목적 외에도 인포테인먼트 시스템 사용, 완전 자율주행 기능 구현 등 다양한 이유로 자율주행차에 통신 기능이 필요합니다.
이는 앞서 언급한 HD맵의 정보를 넘어선 초실시간 정보 수집에서 센서 기반 인지 장비의 한계를 극복하기 위한 방법으로 차량과 주변 차량, 차량과 도로 인프라 및 차량과 보행자 간 연결을 통해 완전한 자율주행차를 구현할 수 있도록 할 수 있기 때문입니다.
C-ITS(차세대 지능형 교통시스템) 시스템 개요, 출처 : 국토교통부 보도자료(2016.6.28)> 이와 같이 운행 중 통신망을 통해 다른 차량이나 도로 등의 인프라가 구축된 물건과 교통정보와 같은 정보를 교환하는 통신기술을 ‘V2X(Vehicleto Everything)’ 통신이라고 하며, 이는 -V2V(Vehicleto Vehicle, 차량간 통신), -V2I(Vehicleto Infrastructure, 차량과 도로 인프라간 통신),V2X 통신에는 WLAN(Wireless Local Area Network, 무선인터넷) 기반의 “DSRC” 방식과 이동통신 기술 기반의 “C-V2X”로 나뉘며 DSRC는 또한 미국 표준의 “WAVE”와 유럽 표준의 “ITS-G5″로 나뉘는데. 두 방식은 서로 다른 소프트웨어 스택을 활용하고 있어 호환되지 않습니다.
기존 차량 및 도로상에서 이미 사용되고 있는 통신표준은 ‘DSRC(Dedicated Short Range Communication:차량용 근거리 통신)’이지만 차량과 노변 기지국 간 100m 이내에서 1Mbps 정도의 속도로 통신하는 기술로 하이패스, 주차관제시스템, 교통정보시스템, 버스정보시스템(BIS) 등이 이 규격을 사용합니다.
“WAVE(Wireless AccessinVehicular Environment)”는 국제표준화단체 IEE[1]가 표준화 작업을 수행하는 WLAN 규격 중 하나인 “IEE802.11p”로서 DSRC에 시속 160Km의 고속주행 상황에서 27Mbps의 대용량 데이터 전송 기능이 추가된 표준으로 V2V, V2I를 지원합니다.
그러나 WAVE 역시 통신속도, 통신지연(100mS) 및 동시접속대수(100~150대) 측면에서 어느 정도 한계가 있어 완전한 자율주행 환경을 지원하지 못하고 있으며 이에 대한 개선으로 IEE에서는 자유이동속도 및 데이터 전송속도 및 추가기능 향상을 위한 차세대 통신기술인 “NGV(NextGeneration V2X)”를 “IEE 802.11bd”의 표준명으로 개발하고 있습니다.
LTE 기반의 V2V 통신 개념도, 출처 : UCFCAVREL(Univ. of Cetral Florida Connected & Autonomous Vehicle Research Lab) Web > “C-V2X(Cellular-V2X)”는 이동통신 기술에 그 기반을 두고 있습니다. 3GPP에서 2017년 LTE 기반 Release-14 규격인 “LTE-V2X”를 발표하여 표준화가 완료되었고, 2018년 Release-15에서 개선된 “LTE-eV2X”의 표준화가 완료되었다. 현재는 5G 기반 ‘NRV2X(5G-V2X)’ 표준화가 2020년 7월 Release-16에서 승인 완료돼 2023년 상용화를 예상하고 있습니다.● 네트워크 슬라이싱(NetworkSlicing) LTE에서는 음성 서비스와 데이터 서비스만 구분하고 데이터…blog.naver.comWAVE나 LTE-V2X는 모두 차량 통신에 특화된 기술이지만 자율주행 측면에서 충분치 않은 성능을 가지고 있습니다. 그것은 차량 운행에 있어 안전한 주행이 가능하려면 통신 지연 시간이 최대한 짧아야 합니다.
예를 들어 고속주행에서 상황을 감지하고 브레이크를 작동시킬 때까지 WAVE나 LTE-V2X는 100ms 지연이 발생할 수 있기 때문에 안전성이 크게 떨어진다는 의미입니다. 다만 LTE-V2X는 NR-V2X(5G-V2X)로 진화할 경우 이 문제를 해결할 수 있다.
한편 자율주행차 통신기술, 즉 5.9GHz 대역의 차량 통신기술로서 DSRC 기반(WAVE 계열 통신포함)을 사용할지, C-V2X 계열 통신기술을 사용할지 경쟁도 지속되어 왔지만, DSRC는 즉시 상용화할 수 있다는 장점이 있고, C-V2X는 신기술로 미래 확장성에 대한 장점이 있어 글로벌 시장기술 경쟁력 확보 측면이 필요하기 때문입니다.
현재는 세계 각국이 C-V2X 계열로 진행하고 있는 분위기입니다. EU에서는 DSRC에 기반한 법제화가 부결됐고 중국은 2018년에, 미국은 2020년에 C-V2X를 추진하기로 결정했습니다. 우리나라는 국토교통부와 자동차업계는 DSRC를, 과학기술정보통신부와 통신업계는 C-V2X를 선호하고 입장차가 있어 아직 결정되지 않아 조정이 필요합니다.
2020년 9월 싱가포르는 DSRC와 V2X 통신을 모두 사용하는 하이브리드 방식의 표준을 개발하고 실증을 포함한 차세대 모빌리티 생태계를 구현하는 COSMO(COnected SmartMobility) 프로그램을 발표했습니다. 우리나라에서도 양자택일이 아닌 현실적 방안으로 두 가지 방식을 계속 추진하자는 의견이 많이 나오고 있습니다.
COSMO 프로그램 개념도, 출처 : NTU(Nan Yang Technological Univ.) Single apore COSMO programbrchure > DSRC는 짧은 커버리지(WAVE의 경우 반경 500m 정도)의 약점도 있지만 차세대 지능형 교통시스템(C-ITS, Cooperative-Intelligent Transport Systems) 구축을 위해 개발된 기술로 지난 10여년이 기술적 안전성과 완성도를 이미 보여준다는 장점이 있습니다.
C2X의 경우 원래 자율주행차용으로 개발된 기술로 전송속도, 커버라지, 동시접속기기 수 등 통신규격 면에서 훨씬 좋은 장점이 있지만 현재 테스트에서는 여러 문제점이 도출되고 있어 상용화에 대한 준비가 되지 않았다는 약점도 있습니다.
그래서 WAVE와 C-V2X 기술을 서로 경쟁적인 기술로 보기보다는 싱가포르의 경우처럼 두 기술을 통합한 ‘하이브리드 V2X’ 통신망을 구축함으로써 서로 보완재로 보고 추진해야 한다는 의견입니다.항목 DSRCWAVENGV(진행 중) LTE-V2X 5G-V2X 규격 표준 802.11p IEE 802.11bd 3GPP Rel143GPP Rel16 데이터 전송률 54Mbps 27Mbp 270Mbps 20Gbps(emB) 지연 시간 <100mS <100mS <1mS(URLCC) 밀도(/Km2)
150대
10만대100만대(mMTC)이동성200Km/h160Km/h160Km/h500Km/h커버리지250~300M500M1,000M수Km이내수Km이내표<V2X통신기술비교>
[1] Institute of Electrical and Electronics Engineers, 미국전기전자기술자협회, 사물인터넷 표준화 단체 내용(http://blog.naver.com/moons4ir/222168316784) 참조