외관 이외의 필수적인 핵심 기능은 어느 정도 구현되어 거의 막바지 상태라고 생각한다.
ROS 자율주행 로봇 PID Gain 튜닝 전
PID Gain 튜닝 전에는 확실히 굉장히 거친 느낌이야
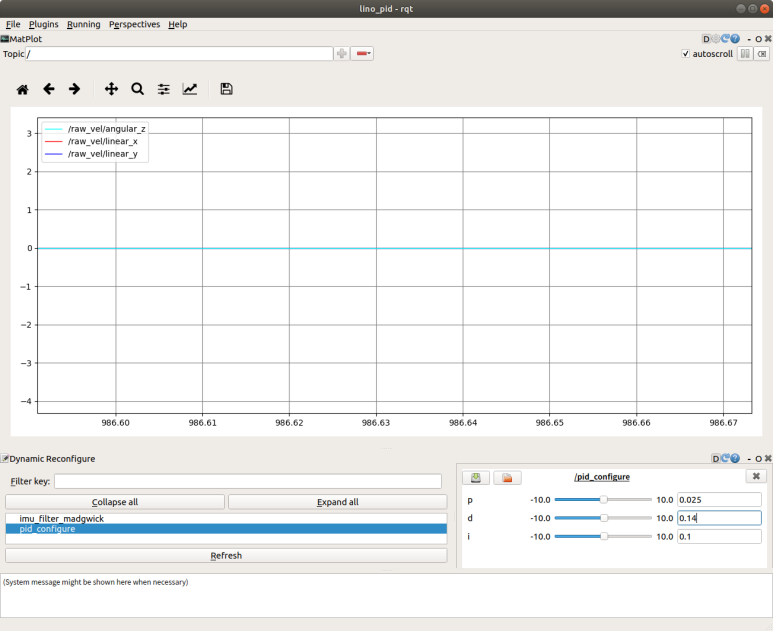
RQT를 통해 목표치에 얼마나 도달하는지 시각적으로 확인할 수 있다.
ROS 자율주행 로봇 PID Gain 튜닝 후
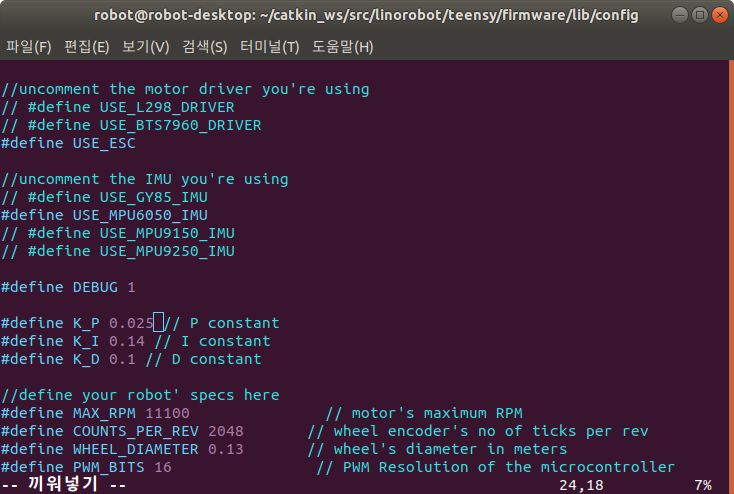
반복 노단에서 얻은 적절한 PID Gain 상수(Kp, Kd, Ki)
튜닝을 하면 확실히 안정된 모습을 보여준다.
Overshoot를 줄이고 정상 상태의 오차를 줄이기 위한 값을 찾는데, 이전 전공수업에서는 Kd, Ki를 100, 1000학점까지도 높게 키웠던 것으로 기억하는데, 이번에는 차라리 소수점 단위로 낮추는 것이 더 나은 제어가 됐다.
ROS 자율주행 로봇 원격제어 실내주행 테스트
주행시험 초반에 발생한 문제는 어느 정도 해결된 모습이다.
목표치는 일반인의 걸음걸이 속도인 3km/h, 즉 0.8m/s이다.
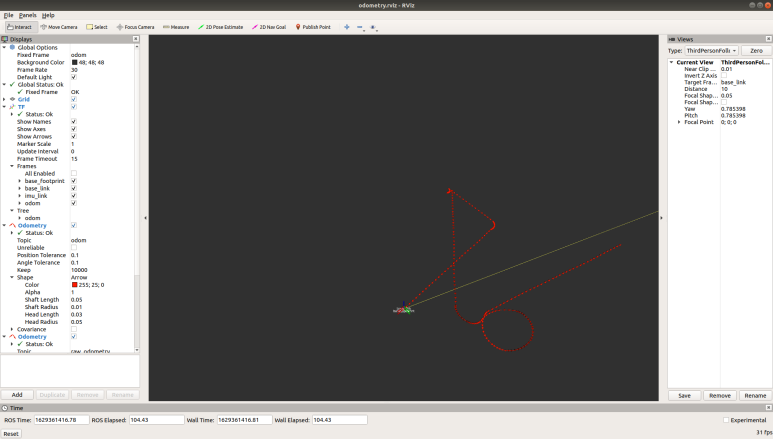
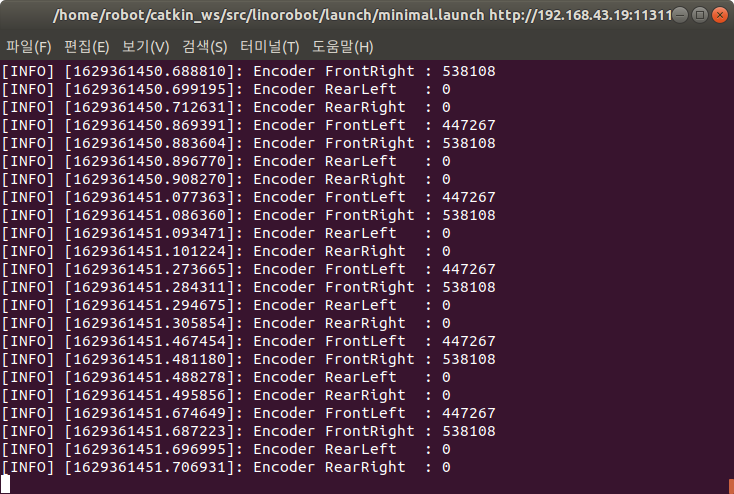
ROS 자율주행 로봇 Odometry 테스트
SLAM과 Navigation을 위해 필요한 오도메트리 측정도 무난하게 이루어지고 있는 듯하다.

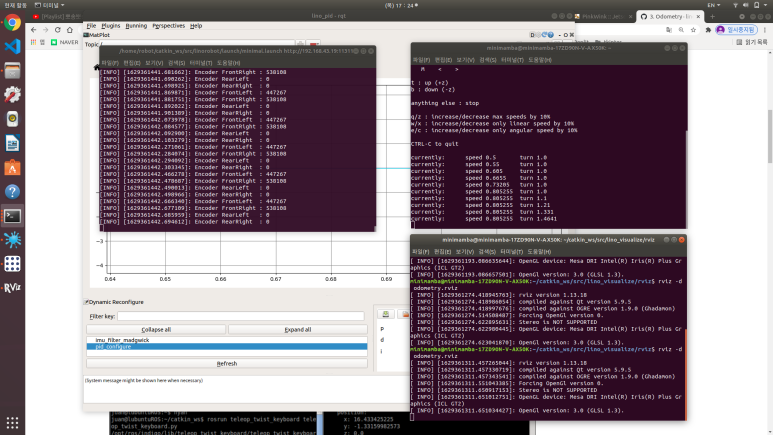
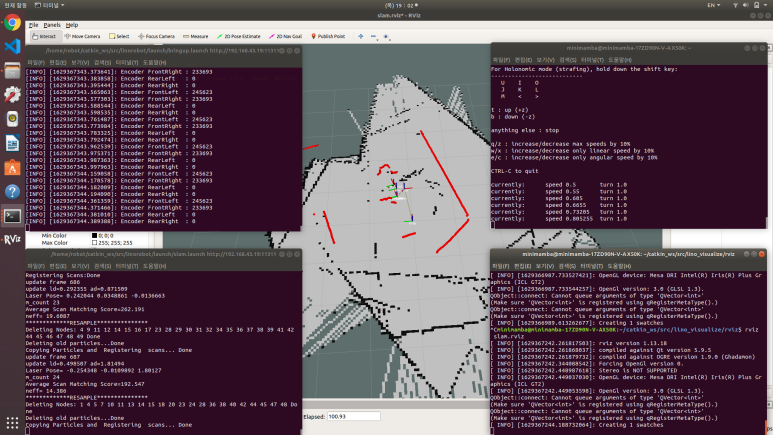
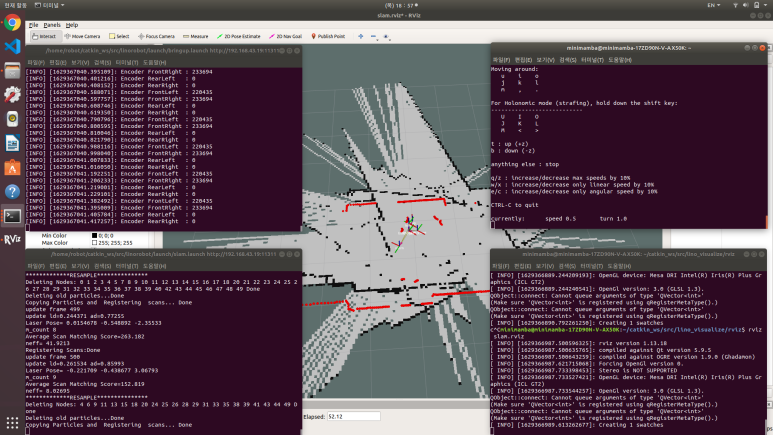
항상 많은 터미널 윈도가 필요한 ROS…
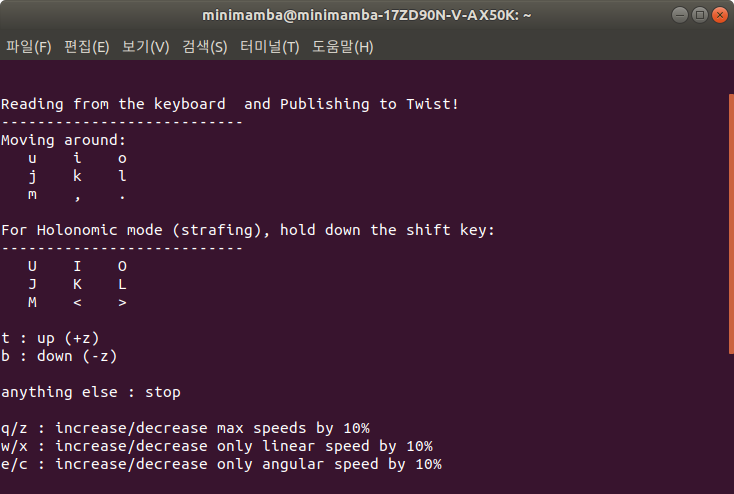
리모트 컨트롤을 위한 스텝키이다.
Odometry를 위한 인코더 값 측정
Autonomous ground robots ( 2WD , 4WD , Ackermann Steering , Mecanum Drive ) – 3 . Odometry · linorobot / linorobot Wikigithub.com
참고한 linoro bot 카라허브
관련 명령어
먼저 pid_configure를 통해 알게 된 gain 상수를 로봇에 직접 대입한다.
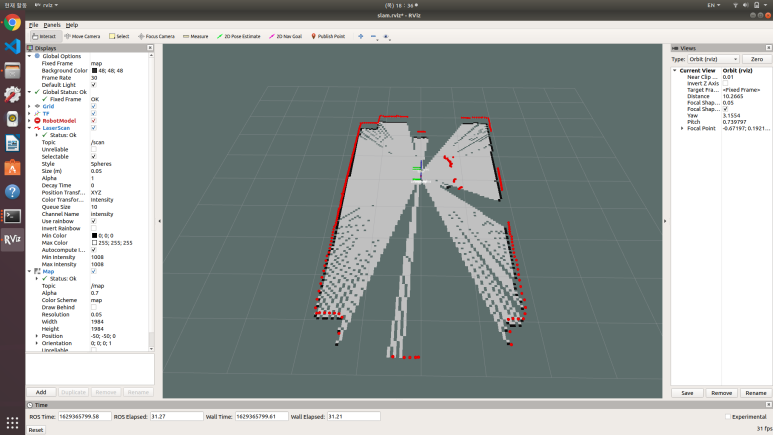
라이더(LiDAR)에 의한 SLA M이 처음에는 잘 될 것 같았으나 어느 순간부터 에러가 발생한다.
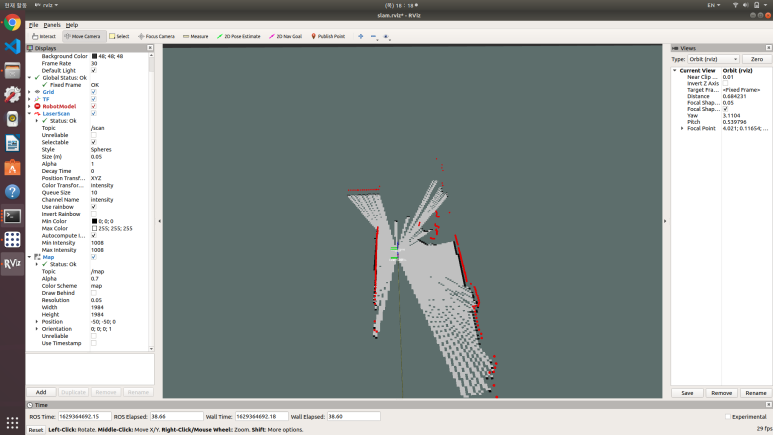
SLAM을 하는데 뭔가 문제가 생겼다아마도 Odometry문제인가보다.
IMU 센서 Calibration을 다시 해봐야 할 것 같다.
또 하나의 문제점은, 마루의 상태가 주행에 크게 영향을 준다는 것이다.
map을 제작하기 위해 이곳저곳을 돌아다녔지만 바닥이 울퉁불퉁해져 있으면 현재 우리 로봇은 타이어가 제대로 돌아가지 않는다. 바닥(바닥)에 놀이가 발생해 바퀴가 접지되지 않아 헛돌게 된다.
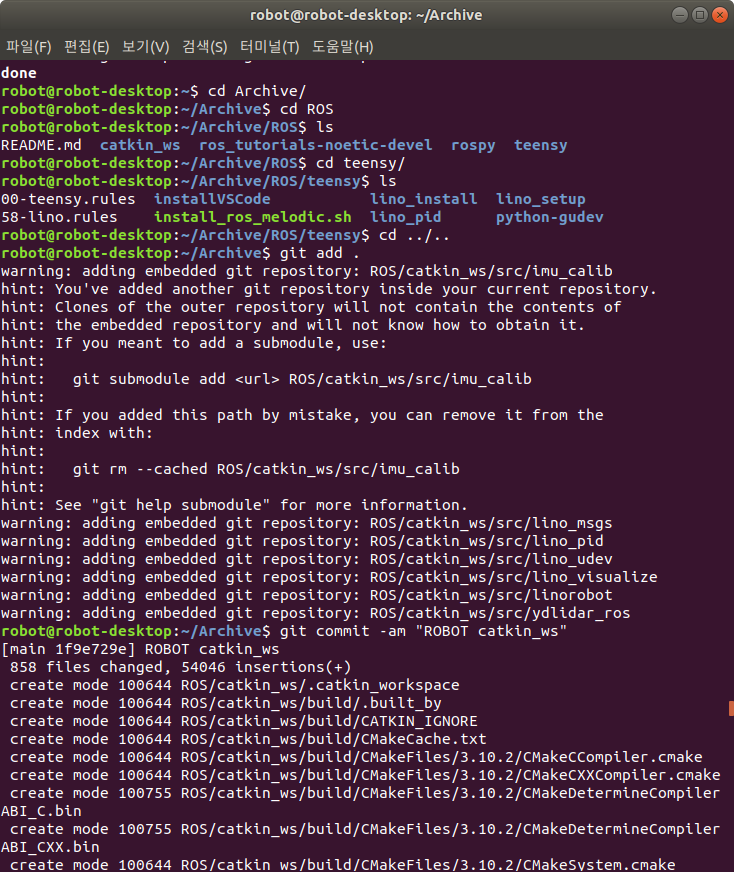
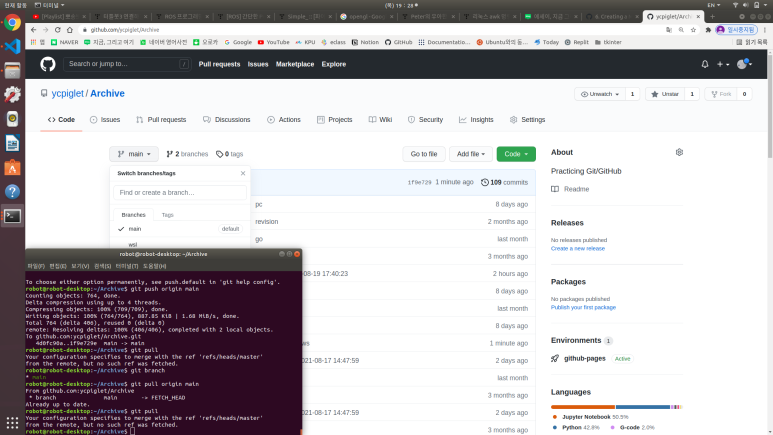
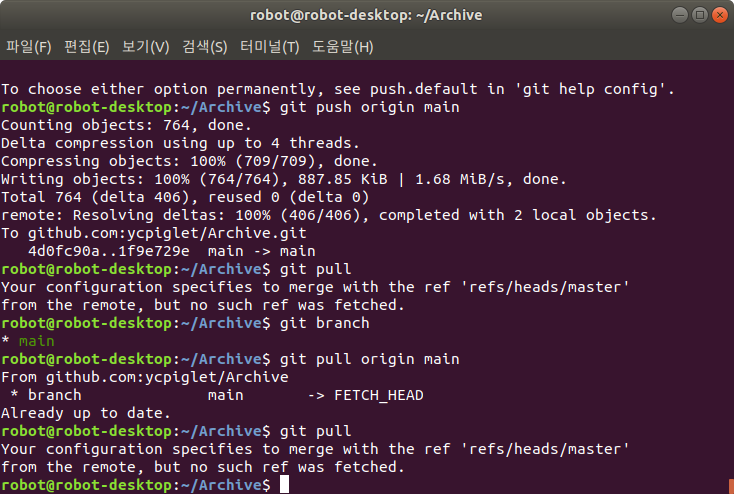
이건 git 쓰다가 에러 난 모습 처음 보는 에러일 거야